
Short Bio
I’m a Ph.D. graduate from Harada Lab., in Osaka Unversity, supervised by Professor Harada Kensuke and Professor Wan Weiwei. My research interest is robotic manipulation. I received my M.E. from Nanyang Technologic University and B.E. from Tianjin University, China.
Research Interest
My major interest is robotic manipulation, which include grasping planning, motion planning, and other low level and high level task planning algorithms. I am also studying visual perception, image processing and force control to enhance the robotic manipulation system.
Research
Next Best View Planning for Metal Plate 3D Model Obtaining
Ruishuang Liu, Chuan Li, Weiwei Wan, Jia Pan, and Kensuke HaradaIEEE Robotics and Automation Letters (RA-L), 2024.
[Paper] [Bibtex]
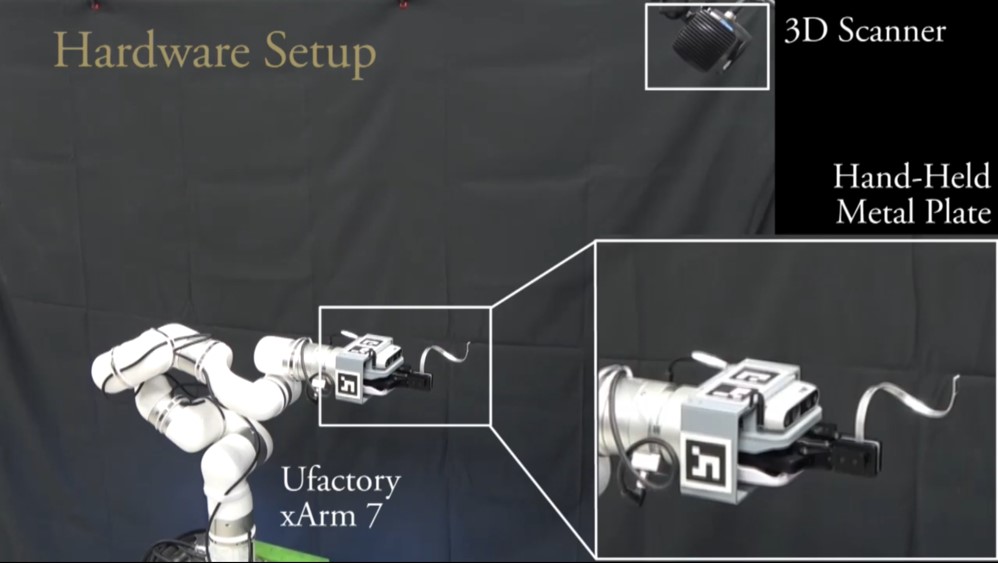
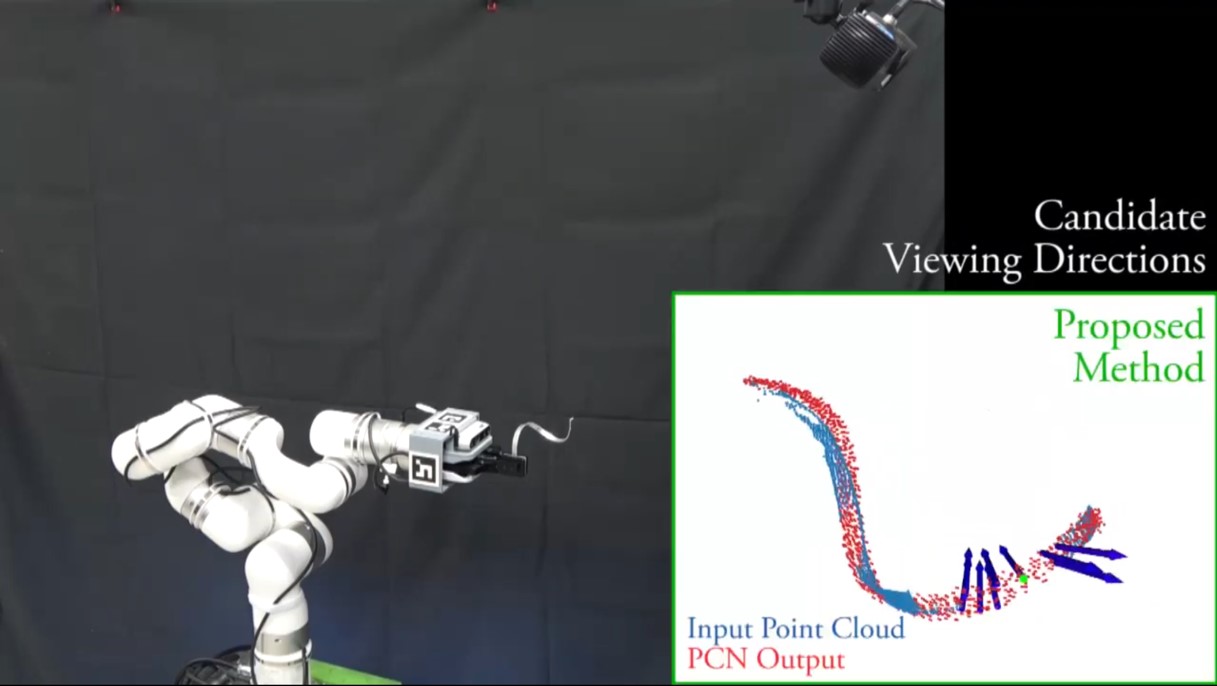
This video shows a Next Best Views (NBV) planner for capturing a thin, curved metal plate using a depth camera and a robot manipulator equipped with an external stationary depth sensor. The proposed approach aims to efficiently collect the object's surface point cloud data and reconstruct its 3D model with a minimal number of views.
Metal Wire Manipulation Planning for 3D Curving
Ruishuang Liu, Weiwei Wan, Emiko Tanaka Isomura, and Kensuke HaradaIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022.
IEEE Transactions on Automation Science and Engineering (T-ASE), 2023.
[Conference Ver.] [Jornal Ver.] [Bibtex]
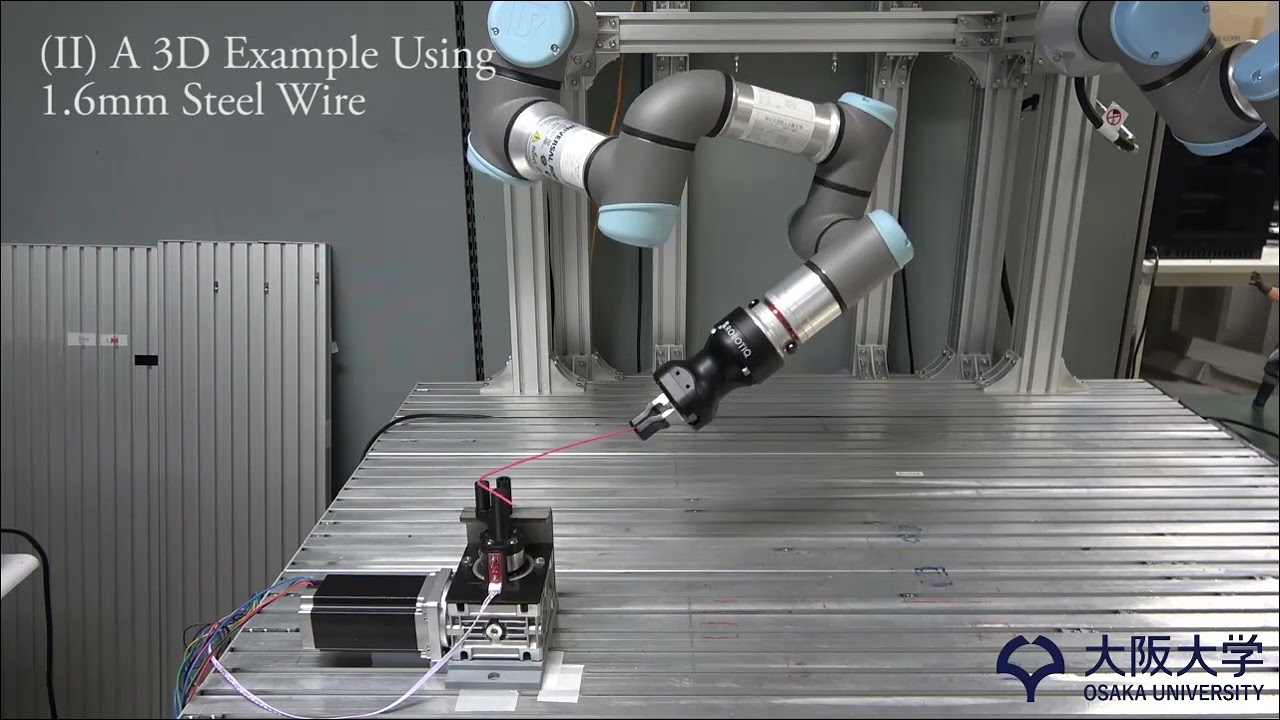
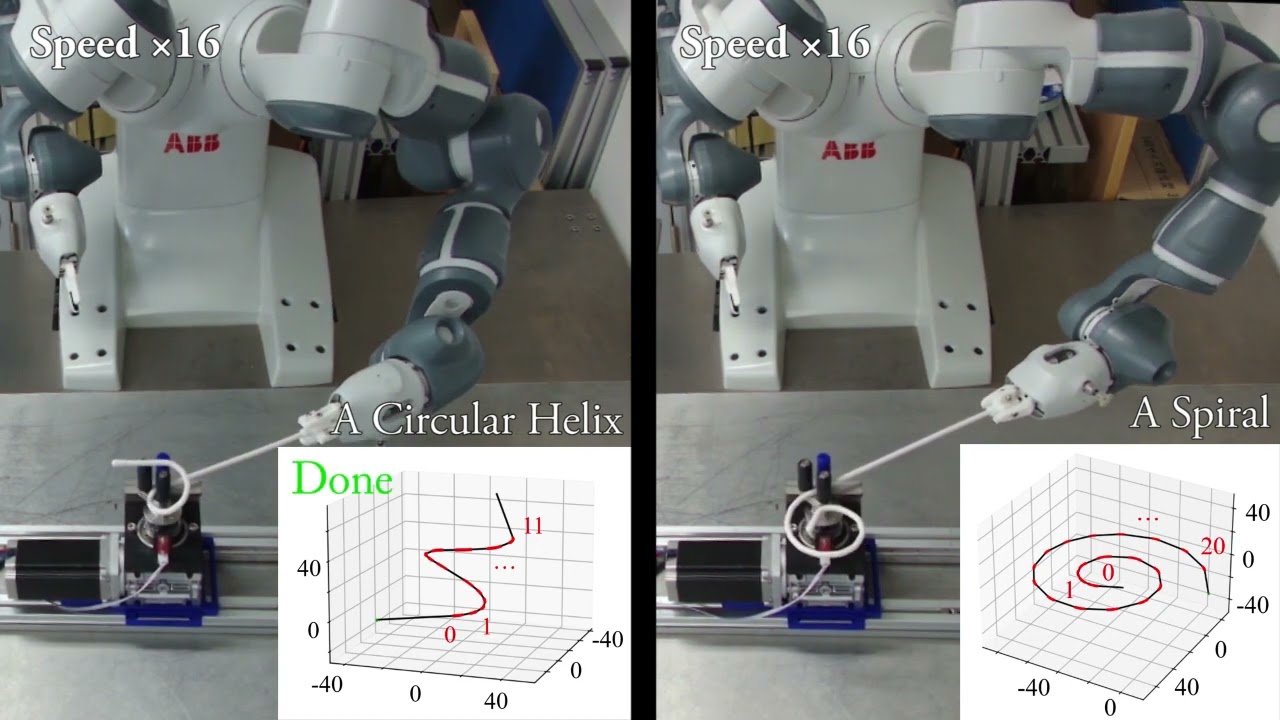
This video shows a combined task and motion planner (TAMP) for a robot arm to work with a bending machine in 3D metal wire curving tasks commonly found in manufacturing and medical fields. Our method converts a 3D curve to a bending set and generates the feasible bending sequence, machine usage, robotic grasp poses, and pick-and-place arm motion considering the combined task and motion level constraints.
Robotic 3D Drawing
Ruishuang Liu, Weiwei Wan, Keisuke Koyama, and Kensuke HaradaIEEE Transactions on Robotics (T-RO), 2022.
[Website] [Paper] [Bibtex]
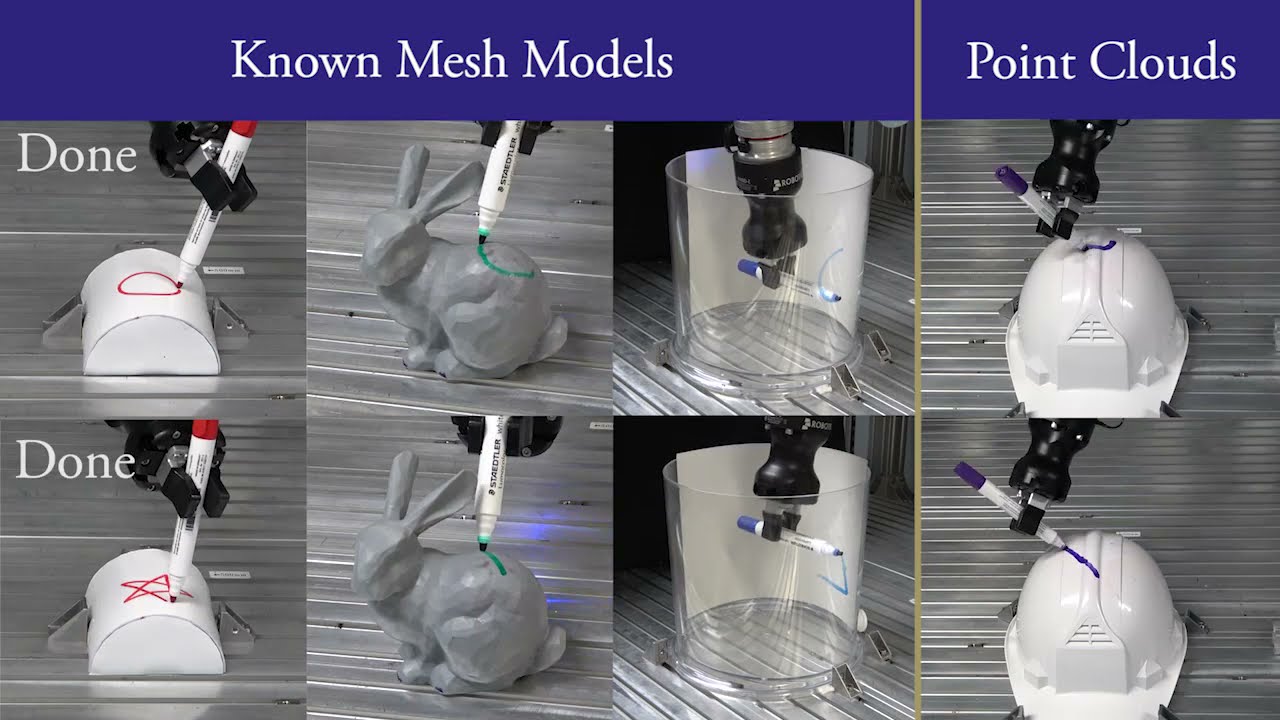
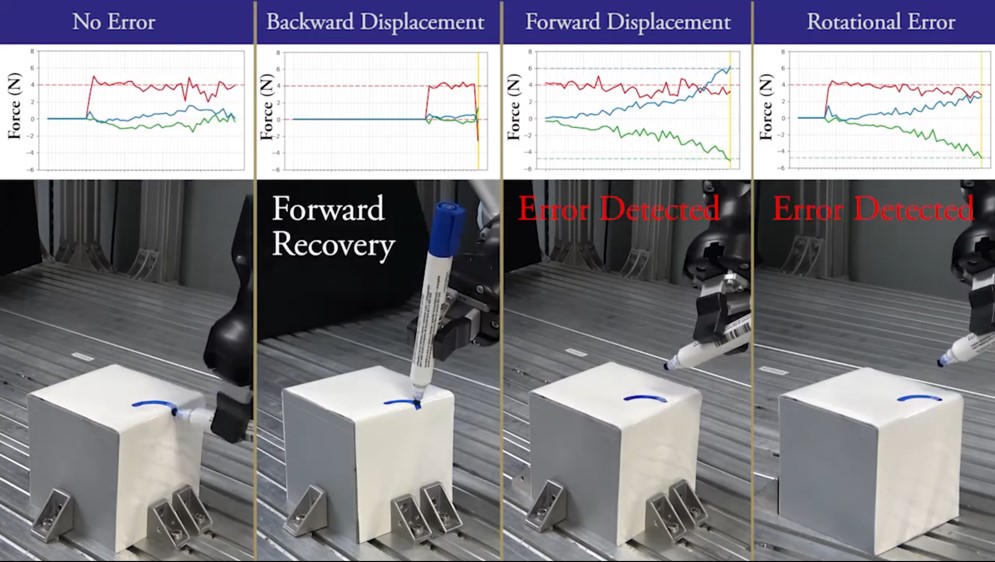
This video shows a flexible and robust robotic system for autonomous drawing on 3D surfaces. The system maps the strokes onto the surface and generates robot motion using visual recognition, grasp pose reasoning, and motion planning. Unlike conventional systems, the robot can recognize and pick up pens to draw 3D strokes, making it more flexible. The system's robustness is ensured by minimizing deformation in the strokes, re-estimating the drawing tool's pose, employing force control, and implementing error detection and recovery.
Award
“Metal Wire Manipulation Planning for 3D Curving – How a Low Payload Robot Can Use a Bending Machine to Bend Stiff Metal Wire”, IEEE Robotics and Automation Society Japan Joint Chapter Young Award (IROS, CASE 2022), 2022/10/27
“Robust Robotic 3D Drawing using Closed-loop Planning and Online Picked Pens”, IEEE Robotics and Automation Society Japan Joint Chapter Student Author Award (T-RO with IROS 2022 Presentation), 2022/10/27
“Planning 3D Robotic Drawing”, Finalist of the 2nd International Session Best Presentation Award, 日本ロボット学会, 2020/10/10.